The automotive industry is currently navigating its most significant structural transformation since the invention of the assembly line. As we move through 2026, the focus has shifted from the mechanical “nuts and bolts” to the “bits and bytes.” At the heart of this revolution is a fundamental change in vehicle E/E (Electrical/Electronic) architecture. The transition from traditional, decentralized systems to centralized, zonal models is not just a technical preference; it is a survival requirement for the Software-Defined Vehicle (SDV) era.
1. The Complexity Crisis: The Wiring Harness Nightmare
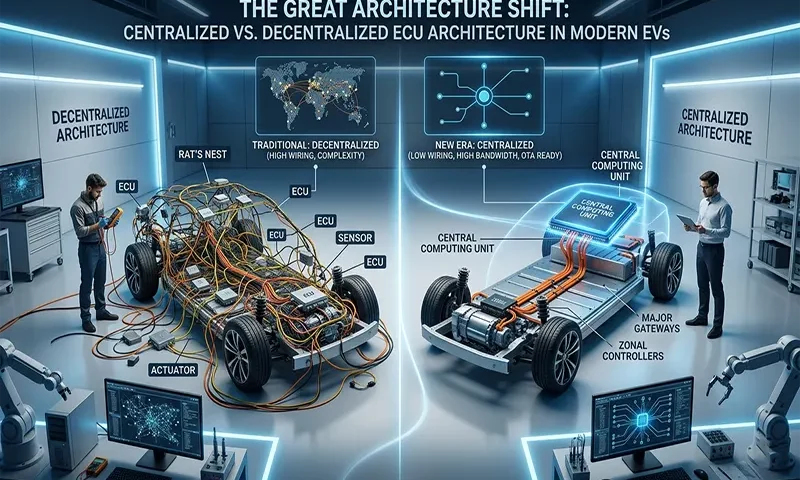
For decades, the standard approach to vehicle electronics was “one function, one ECU.” If a manufacturer wanted to add power seats, they added a dedicated Electronic Control Unit (ECU) under the seat. By the early 2020s, premium vehicles reached a breaking point, carrying over 100 independent ECUs connected by miles of copper wiring.
This “Distributed Architecture” created a Wiring Harness Nightmare. These harnesses became the third heaviest and most expensive component in the vehicle, behind only the engine/battery and the chassis. Furthermore, the sheer complexity of managing 100+ different software versions from 50+ different suppliers made coordinated updates nearly impossible.
2. Decentralized (Distributed) Architecture: The Legacy Approach
In a decentralized model, functionality is siloed. The braking system, the HVAC, and the infotainment each have their own processor and memory.
- Pros:
- Modular Reliability: If the window controller fails, the rest of the car is unaffected.
- Supplier Independence: OEMs can buy a “black box” braking system from one Tier-1 supplier and a lighting system from another.
- Cons:
- Weight & Bulk: Excessive wiring is required to connect every peripheral back to the power source and communication bus.
- Latency: Data must hop through multiple gateways to get from a sensor to an actuator.
- Update Hell: Synchronizing an Over-the-Air (OTA) update across 100 modules with different operating systems is a logistical catastrophe.
3. The Rise of Zonal & Centralized Architecture
The industry is now consolidating these silos into a “Server-on-Wheels” model. This shift involves two critical steps: Zonal Architecture and Centralized Computing.
Zonal Architecture
Instead of grouping ECUs by function, zonal architecture groups them by location. A vehicle might have four Zonal Gateways (Front-Left, Front-Right, Rear-Left, Rear-Right). All sensors and actuators in a corner of the car plug into their local zonal gateway, which then communicates with the central “brain” via high-speed Automotive Ethernet (10Gbps+). This reduces wiring weight by up to 30% to 50%.
Centralized Architecture
The heavy lifting is moved to a few High-Performance Compute (HPC) units. These “Vehicle Brains” use powerful SoCs (System on Chips) capable of over 1,000 TOPS (Tera Operations Per Second).
- Central Brain 1: Handles ADAS, autonomous driving, and sensor fusion.
- Central Brain 2: Manages the Cockpit, Infotainment, and Connectivity.
- Central Brain 3: Manages Propulsion, Battery, and Chassis dynamics.
4. Legacy Distributed vs. Modern Centralized: A Comparison
| Metric | Decentralized (Legacy) | Centralized (Modern 2026) |
| ECU Count | 70 – 120 | 2 – 5 (plus Zonal Gateways) |
| Wiring Weight | 50kg – 80kg | 20kg – 40kg |
| Primary Network | CAN / LIN (Low Speed) | Automotive Ethernet / TSN |
| OTA Updates | Fragmented / Difficult | Seamless / Full-Vehicle |
| Software Model | Hardware-Locked | Software-Defined (Apps/Services) |
5. Software-Defined Vehicle (SDV) Enablement
Centralization is the primary enabler of the SDV. In a centralized model, the software is decoupled from the hardware. Using a Hypervisor, multiple operating systems can run on a single HPC unit. This allows OEMs to:
- Deploy new features (like an upgraded Traction Control algorithm) via OTA in minutes.
- Unlock subscription-based services post-purchase.
- Utilize Digital Twins to simulate performance and predict failures before they happen.
6. Challenges of Centralization: Safety and Security
Moving to a centralized model isn’t without risks.
- The Single Point of Failure: If a central processor fails, the car loses multiple functions simultaneously. To counter this, 2026 architectures use Dual-System Lockstep redundancy, where two processors run the same calculations in parallel to verify results.
- Cybersecurity: A centralized gateway provides a more sophisticated “front door” for hackers. However, it also allows for a more robust, unified firewall and Intrusion Detection System (IDS) compared to 100 vulnerable, low-power ECUs.
- Thermal Management: These HPC units generate significant heat. In 2026, many high-end EVs now include dedicated liquid-cooling loops specifically for the vehicle’s central computers.
7. The Future of Vehicle OS
The decentralized model served the industry well for half a century, but it has reached its physical and logical limit. For the autonomous, AI-integrated, and hyper-connected EVs of the late 2020s, centralized architecture is the only path forward. By moving to a server-based model, manufacturers are finally turning the car into what it was always meant to be: a sophisticated, upgradable, and intelligent mobile device.
